成蹊大学 ロボティクス研究室
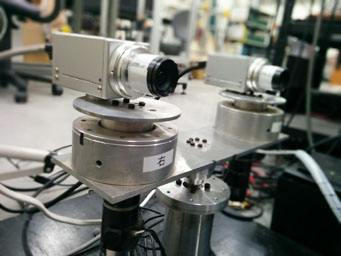
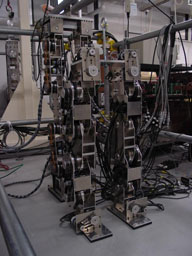
| 研究室について | 成蹊大学ロボティクス研究室では,産業応用を念頭においたロボットの研究を行っています。産業用ロボット としてよく知られているマニピュレータ型ロボットのほかに,歩行型ロボット,コンピュータビジ ョンなどロボット工学(ロボティクス)に関連した幅広い研究を行っています。現在,二足歩行ロボット,多自由度マニピュレータ,スライダーロボット,ハンドアイシステム, ステレオビジョンによる物体認識,などの製作および実験に取り組んでいます。 |
|---|---|
| キーワード | 画像処理 / マニピュレータ / リハビリテーション / 義足 / 歩行ロボット / ビジュアルフィードバック / モーションコントロール / 移動ロボット |
| ウェブサイト | こちらをクリック(別ウインドウ) |
| 代表論文リンク | 関節可動範囲を最大許容する遅れなし追従視制御 |
| 代表論文リンク | Vision-based Motion Control for Robotic Systems |
| 代表論文リンク | 予測シミュレーションを備えたベクトル場による二足歩行ロボットの歩行動作計画 |